Flight Management Unit for Research (FMU-R)
Our UAS Flight Management Units for Research (FMU-R) is an innovative UAS flight control system that features a tight integration with MATLAB Simulink and a focus on data-quality, fixed-latency, and determinism. The Simulink/C++ Platform for Aeronautics and Autonomy Research and Operations (SPAARO) open-source flight software handles the vehicle's Input / Output plane providing a sandbox to develop state estimation filters, inner and outer loop control laws, and autonomy software in MATLAB Simulink or C++. The system runs at a hard real-time 100 Hz framerate and has a fixed-latency from sensing to actuator outputs to enable robustness analysis. The FMU-R and SPAARO work with Q Ground Control and Mission Planner ground control stations and FMU-R has been used extensively by research institutions, universities, and businesses to conduct world-class aeronautics research and development. Contact info@bolderflight.com to discuss your requirements, pricing, and lead-times; we have many components in stock and ready to ship.
Input / Output Plane
SPAARO handles the vehicle's I/O plane, providing: sensor data, processed and low-pass filtered sensor data, estimates of the vehicle's inertial and air data states, pilot inpus, waypoint commands, actuator and motor commands, data logging, and telemetry.
Performance, Fixed-Latency, and Determinism
The FMU-R uses an ARM Cortex-M7 processor and the SPAARO software is optimized for this hardware design. A data ready interrupt from the onboard IMU is used to trigger the start of a major frame and a hardware timer, set from the IMU interrupt, is used to trigger the actuator outputs. This approach results in an extremely performant, deterministic system with a fixed-latency to enable robustness analysis and guarantees. The hardware features a double-precision hardware floating point unit and includes the Eigen matrix math library for intuitive and easy implementation of state estimation filters or control laws in C++. Nonlinear dynamic inversion control laws, autonomous path planning and optimization software, and real-time parameter estimation algorithms have been flown on this platform in real-time.
Rapid Flight Validation
A digital twin of the FMU-R is available in MATLAB Simulink, enabling rapid integration into a vehicle simulation and use of a model-based design methodology to develop and validate control laws and autonomy software prior to flight. MATLAB Simulink software can be autocoded and uploaded to the FMU-R for flight research and validation. Flight data logs are in MATLAB MAT file format, enabling an efficient process of developing technology, validating in simulation and flight, and analyzing the data.
Easily meet Requirements
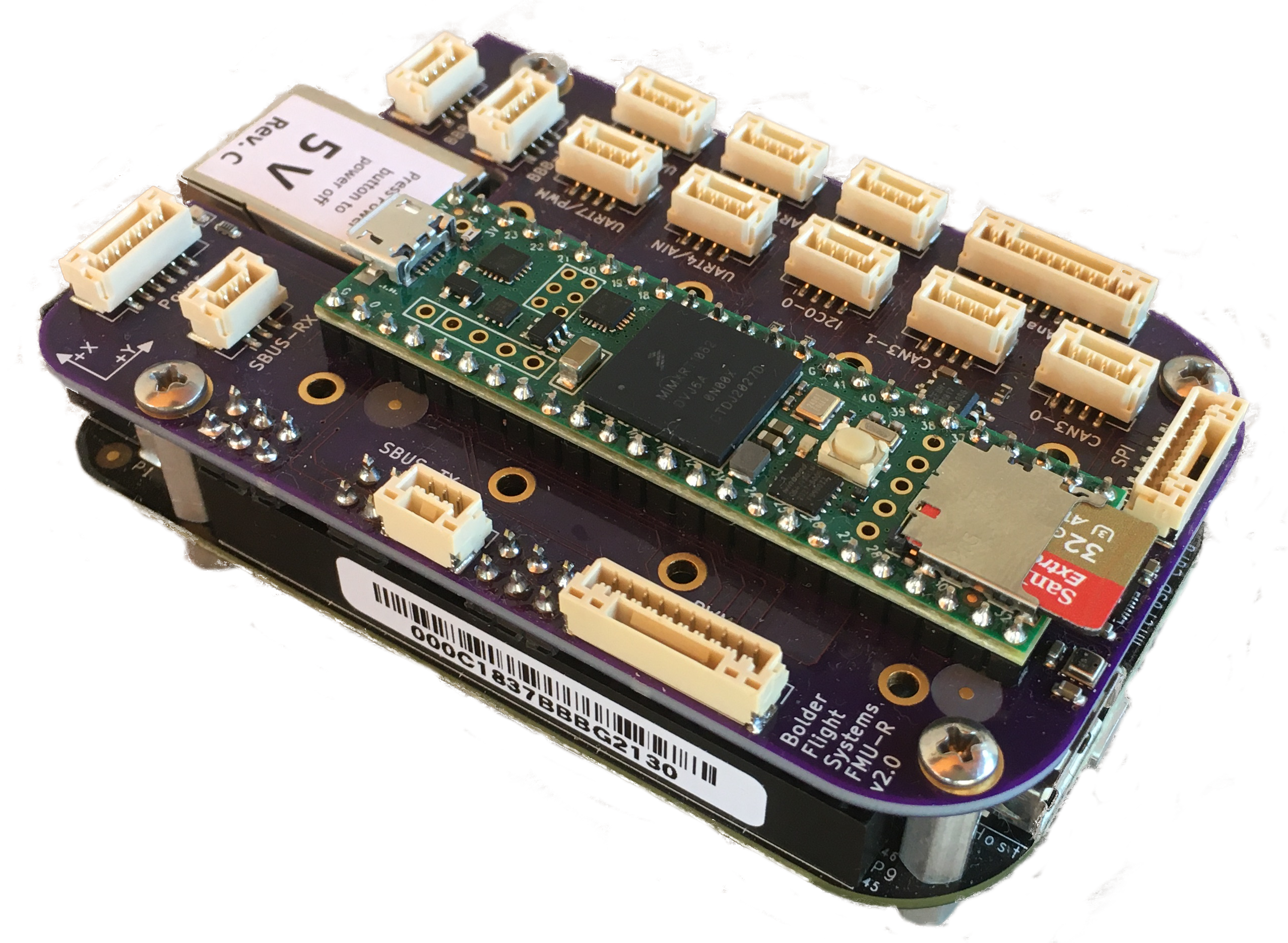
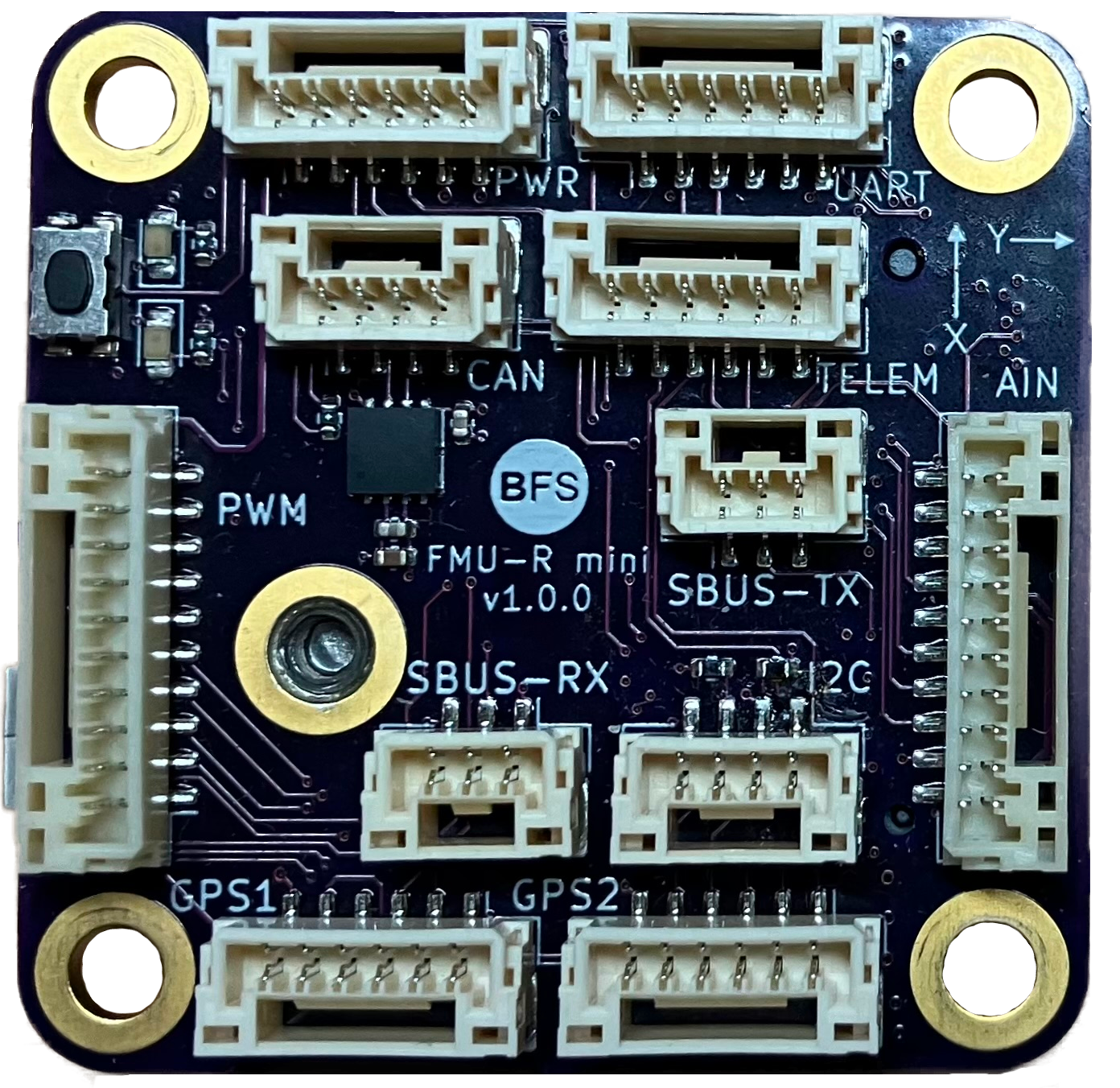
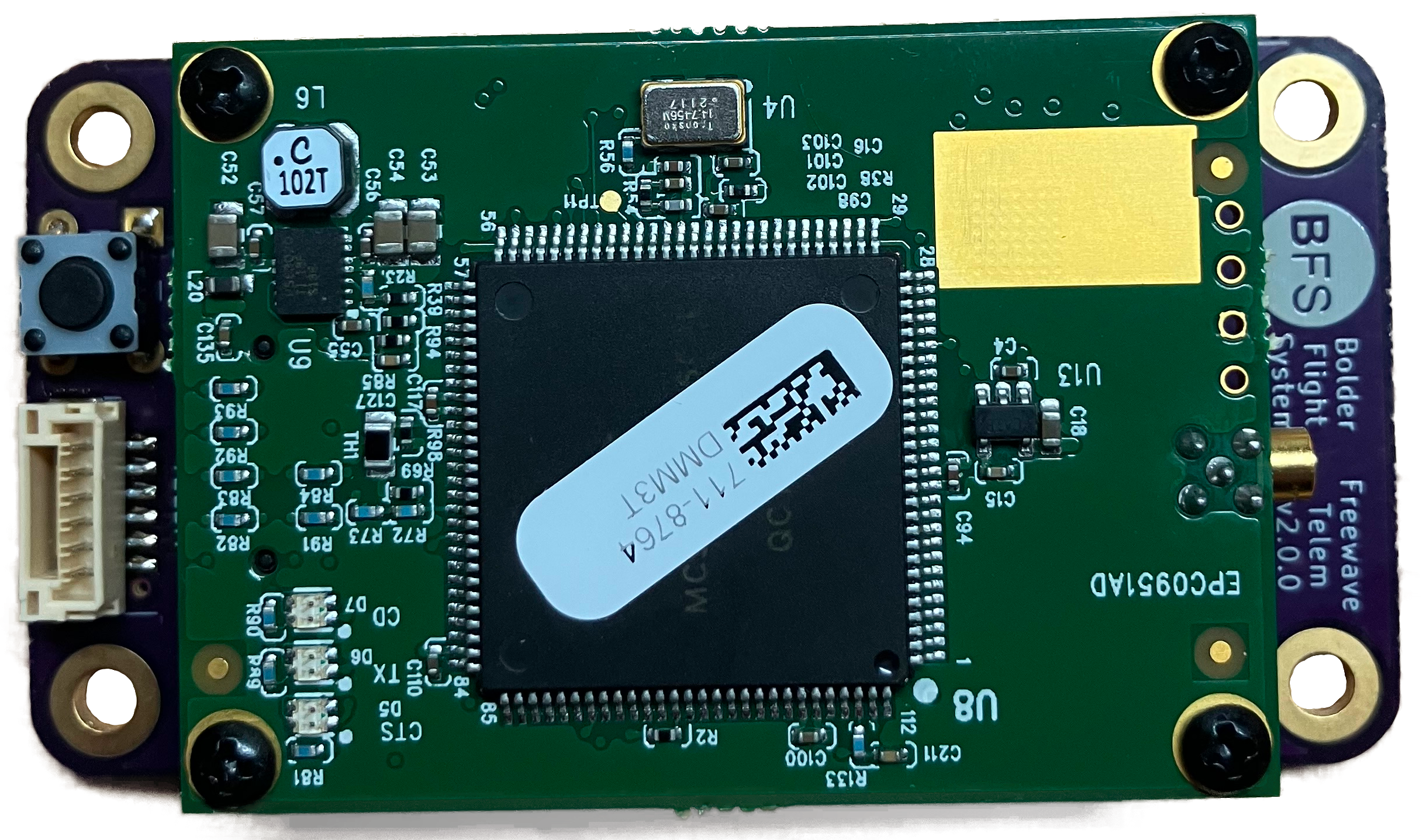
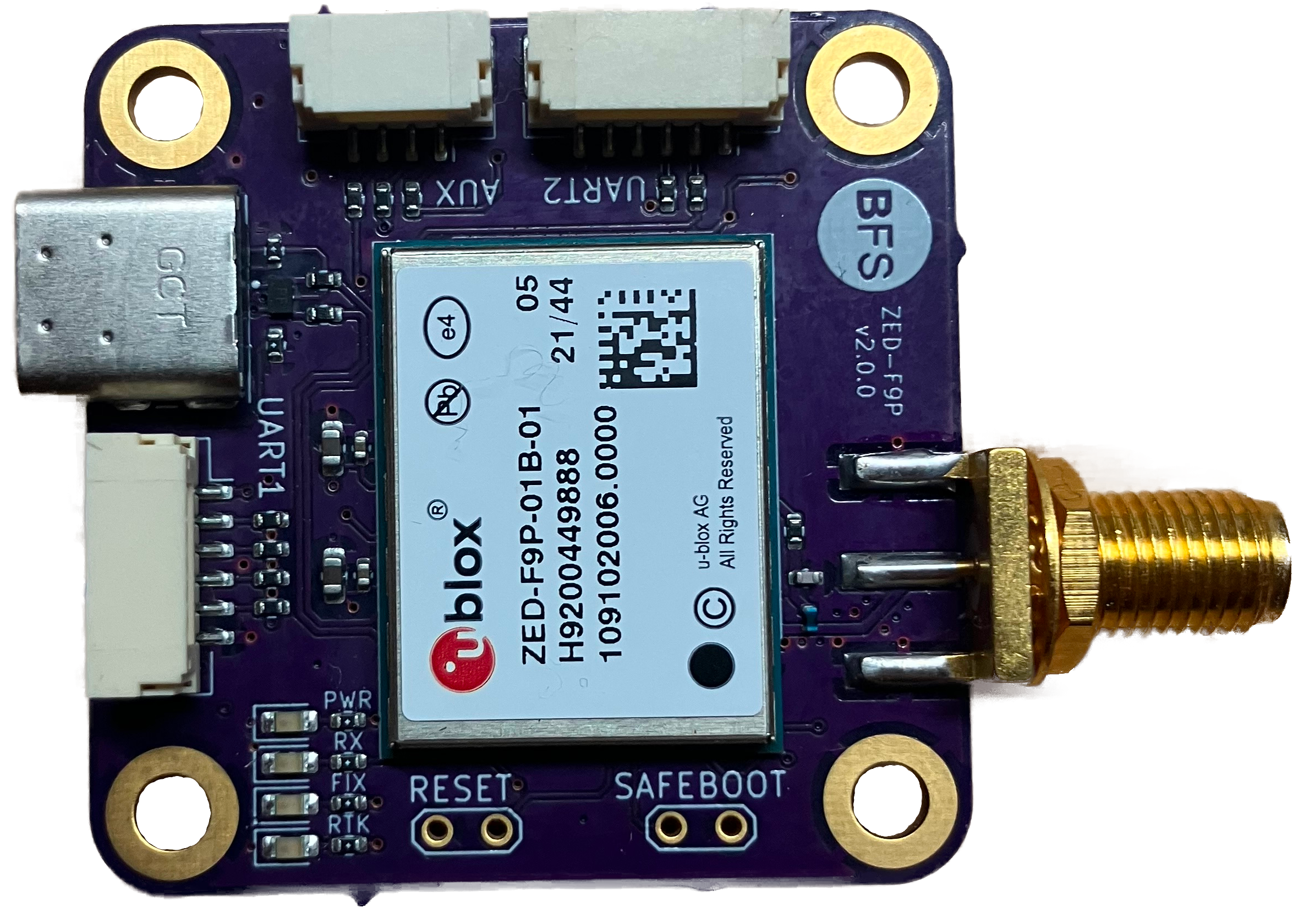
FMU-R is available in two sizes; a full-size unit with a companion computer for outer-loop tasks and a mini unit in a 30mm x 30mm footprint. Each FMU-R features an integrated IMU, static pressure sensor, and plenty of standardized I/O ports for integrating sensors and actuators. Optional higher-end IMUs can be integrated, including the VectorNav VN-100, VN-200, or VN-300. Air data modules are available to measure static and differential pressure or angle of attack and sideslip from air data probes. Bolder Flight Systems makes several GNSS receivers, radio modems, and breakout boards for sensors and actuators to meet a wide-range of sensing and mission requirements.